日本仿人机器人技术
由于难度大、短期实用性不突出,人形机器人的研究在整个世界范围内并不是很受重视——除了在日本。也许是因为日本引以为豪的机器人爱好者文化,让其在这一未来将发挥重大作用的领域抢占先机。所以我们也有幸通过其人形机器人近乎炫技的展示,来一窥我们的技术差距究竟在哪。
世界上第一台人形机器人Wabot-1诞生于日本,由日本早稻田(Waseda)大学Prof. Kato于1973年研究成型,在当年已经有了一套下肢行走控制、视觉、对话交互系统。

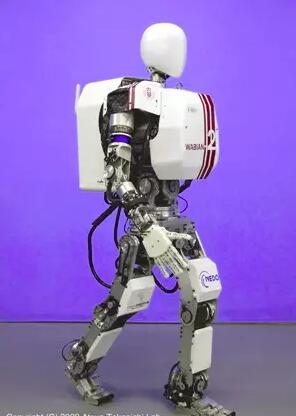
在Prof. Kato退休后,他的两位学生Prof. Takanishi 和 Prof. Sugano分别担起了机器人下肢和上肢的研究。Prof. Takanishi做出了WABIAN,并基于此做了一系列复杂的路面条件下的步行实验,以及模拟人脚对机器人足底结构进行了改进。Prof. Sugano 则从为Wabot-2(1985年)做弹钢琴的机械手开始,目前在做的新型机器人是用作室内服务设想的Twendy-One。
如今早稻田大学依然在人形机器人研究领域位列前沿,当我们身边的大学Robotics Institute(机器人学院)逐渐被提出来的时候,早稻田大学早已成立了Humanoid Robotics Institute(人形机器人学院),可见其科研实力。
从1973年的Wabot-1到如今的WABIAN,我们也可以看出人形机器人的研究是非常困难并需要大量时间的,这也是日本政府为什么产生了制造通用机器人平台的想法,HRP-2正是其中的代表,就如同DRC中美国的Atlas机器人。
HRP-2是基于东京大学JSK实验室早期的人形机器人,由kawada公司和AIST(产业技术综合研究所)合作制造,从2002年一直使用至今,价格在50万美元的量级。它高度153厘米,重量58公斤,有30个自由度。我们看到过很多HRP-2的实验,从洗盘子做菜、叠衣服、搬东西、上楼梯到跳舞等等,可以说是一个非常成功和成熟的实验平台。成熟平台的好处就是降低了研究的门槛,减少了重复造轮子的时间及研究经费,对研究的进步和学生的培养都有很大的好处。HRP-2产品出售到世界各地的人形机器人研究所。
HRP-2之后,kawada公司又制造了HRP-3及HRP-4,机器人更加精美,但售价也上升到了100万美元的量级,因而相比于HRP-2略为少见。

HRP-3 加入了防水功能,可以在潮湿的化工厂里进行作业。和HRP系列漂亮的硬件设计配套的是凝聚诸多学者长期研究成果的软件系统。以HRP4为例,其UI的功能包括输入指定姿态,自动计算出实现该姿势的动力学平衡的轨迹。
除了WABOT、HRP系列、JAXON等,日本有名的人形机器人还有DRC 2013 Trails的冠军SCHAFT,老少皆爱的ASIMO等。由于我们主要讨论的是双足人形机器人,所以像石黑浩教授的以表情像人为特点的机器人不在此展开了。
总得来说,日本相比于美国在人形机器人有很多非常优秀的硬件平台,但在过去的研究中有些重硬件而轻视AI,实验也多为task-oriented任务导向的,相反我们可以看到美国近期的很多机器人研究将AI作为重要的着力点,感兴趣的可以关注Prof. Saxena、Prof. Song-Chun Zhu等近期的成果。这里面也有一个原因是那一代日本顶尖的机器人学教授都出身于机械工程专业。不过近期,日本的研究者们也关注到这一问题,通过交流,感到他们都将AI作为下一个重要的着力点。我们也期待着他们更加优秀和智能的人形机器人的诞生。
扫描二维码分享到微信